
ChipMunk70 (Hyperion) |
【機体関係】 |
|
送信機 |
Futaba FF9A |
受信機 |
Futaba R136HP |
エルロン サーボ |
WayPoint W-1621×2 (analog w:41g t:7.2kg 0.10sec)
|
エレベーター サーボ |
Futaba S9001 (analog w:48g t:3.9kg 0.22sec) |
ラダー サーボ |
WayPoint W-1620 (analog w:50g t:10.6kg 0.13sec) |
バッテリー |
RC-HOBBY 4.8V 720mmA ニッケル水素電池 |
構造 |
主翼:バルサリブ組、バルサハーフプランク 胴体:上部スチロールコア、バルサプランク ベニアトラス構造 |
仕上 |
Hyperionオリジナルフィルム仕上 |
重量 |
約2.9kg(動力バッテリー込) |
初飛行 |
2007/11/04 |
【パワープラント】 |
|
モーター |
HOBBYNET PMBM-80 (12ターン KV値410) |
アンプ |
HOBBYNET PMESC-70A(OPTO) |
動力バッテリー |
Hyperion LCL4200-5S (18.5A 4200mmA コンスタント16C、バースト20C 475g) |
【運用データ】 |
|
APC 14×7E |
- rpm / 31A |
APC 15×8E |
- rpm / 36A |
電流があまり流れていないのでもう少しロードをかけた方が良いかも・・・・ |
|
■ プロローグ ■ |
|
恒例のAirCraftのバーゲンセールに出ていたのは知っていたがROSAさんのところでさらに安値の\12,800で販売していたのでとうとう購入してしまった。
実機はカナダ空軍の初等練習機として生産されていたものでエンジンはライカミングIO-540(260HP)を搭載していましたが、SuperChipMunkは主翼を3フィート詰めてラダーとエレベータを曲技用に面積を増し、背面用に燃料、オイルコンサンプションシステムを改良、塗装はもちろん超有名なArt Schollのものですが残念ながら"トップガン"の撮影中に海面に墜落して亡くなってしまいました。 最近は専用に設計されカーボンなどの最新のマテリアルを使ったアクロ機のエクストラやスホーイなどが活躍しているので練習機を改造したChipMunkは性能的には今となってはかなりショボショボだがこのヒコーキのファンは多い。 |
■ 製作編 ■ |
|
組立ては主翼のカンザシ以外はオール瞬間で接着した。主翼の接合はカンザシのみで強度を持たせるようになっているがあまりにも心配なのでセンターを10cm幅のガラスクロスを巻いた。これだけの幅で巻けば強度は充分で軽量化の為、カンザシは省こうと思ったがラムチェバックなどのアクロをやってみようと思い強度重視にしてみたが、後に意味がない事を思い知らされた。
尾翼なども瞬間で接着しているが誤解している人が多いので書いておくが基本的にエポキシよりも瞬間で取り付けた方が強度があると思う。低粘度の瞬間はバルサに良くしみ込むのでリベット効果が絶大で中粘度の瞬間で肉を持たせるとかなりの強度になる。 エポキシは5分間、15分間は熱する事によりすぐ硬化が始まってしまうのでリベット効果期待できない。また国内製のエポキシは硬化してもカチカチにならないので衝撃にも弱い。エポキシを使うなら海外製のボトルに入った模型専用のもの以外は使用しない方が良いと思う。 |

|
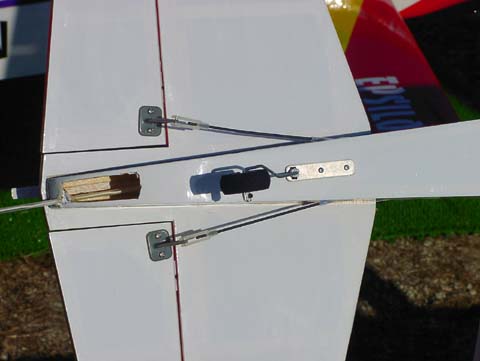
エレベーターと尾輪の様子、エレベーターのリンケージにはあまりお金をかけたくなかったのでホーンは付属の物だがアジャストチップはお気に入りのオリエント(東京堂)製を使用、取出しはテフロンチューブにしたのでスムーズです。
エレベーターに限らずリンケージの基本は外ー外です、写真の通りホーンの1番上の穴を使います。舵角が足りないようならサーボホーンを大きい物を使います。この基本を最近は知らない人が多いような気がします。 ちなみにこのメーカーのキットはロッドの取出口が側板に開けてあるが位置が全く合いません。開口部をバルサで塞いで穴を開け直す必要があるので勘弁してください。 尾輪金具は付属ものは気に入らなかったのでテトラやIM製を数種類購入してみたがどれも使用できなくて結局付属ものなのでイケていません。 |
|
エレベータのリンケージの基本は真っ直ぐです、曲げてしまうとロッドがたわんでしまうのでスタント機では厳禁ですがこのヒコーキはそれ程こだわる必要はないのですが真っ直ぐにしました。ちなみに付属のロッド棒はやはり使い物にならないのでバルサの丸棒に交換してあります。
胴体の後部には小さくて気休め程度かもかもしれませんが排気口を開けてみました。ノイズレスパイプはもちろんアンテナを通していますが胴体が短いのでかなり後に出てしまっています。 |

|
ラダーのリンケージはノイズレスパイプに1.7mmのピアノ線を通すというもうどうにもならないユーザーをナメた方式、ニュートラルの悪いWaypointのサーボ使う予定なので反対側にもノイズレスパイプを通してワイヤーに変更した。
尾輪がラダーに直結なので標準の樹脂ギヤのサーボだとギヤをすぐに痛めてしまいそうなのでしかたなく安くて金属ギヤのWaypointを使っている。 |
|
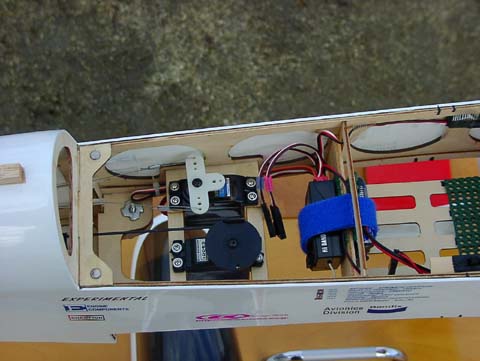
メカ積みの様子、Waypointのサーボはやはり4.8Vではダメダメですがラダーなのでとりあえずそんなに影響はないと思いますが多少は気になります。もちろんBECは嫌いなので700mmAのニッケル水素電池を使っていますが、このクラスならBECでも問題はないと思いますが・・・・
BECが嫌いなのは思い込みかも知れませんがモーターなどは起動時にかなりの電流が流れます。サーボは正転逆転の繰り返しで、さらにスナップロールではすべてのサーボが瞬時に振切りますので4Aや5A程度のBECでは容量が瞬間的に不足してしまう可能性があるのでスタント機には無理だと考えています。 |

|
エルロンリンケージの様子。上記であれほどリンケージの基本は外ー外と言っておきながらひとつ内側の穴を使っています。これは飛行後舵角が足りなくて、しかもサーボホーンは1番外側なのでとりあえずひとつ内側にしました。
ちなみに付属のホーンですがアジャストチップはやはりお気に入りのオリエント(東京堂)製でサーボ側は最も低コストで最も信頼性の高いZベンドです。耐久性はイマイチでガタが出やすいですがそんなに回数を飛ばすヒコーキではないのでこれで充分です。 |
■ 飛行編 ■ |

|
E-materで電流をチェック中、電動機には必ず必要な作業ですね。
|
|
飛行前にまずは電流のチェック、5セルなのでかなりアンダーな設定で45~50A位流れくれると元気良く飛ぶのですが14×7Eで31A、15×8Eで36Aとかなりイマイチ、エンジン機でOSのFS-52で飛ばしているような感じでしょうか。
飛行に関してはエルロンにもWaypointのサーボを使っている関係でかなりエルロンの操舵性がイマイチでニュートラルが悪すぎ、また胴体が短いのでスタント機になれているのでピッチイング方向の安定性もやはりイマイチ、まるでEPP機を飛ばしている感覚です。やはり実機はアクロ機ですがスケール機は飛ばしてもあまり面白くないと言うのが本音です。 |

|
やはりアクロ機は背面でローパスが絵になります。
デテールはキャノピーが小さめで上反角が少ないのでややスケール感に欠けますがカラーリングとデカールで良い雰囲気を出しています。 最近のアクロ機に比べると舵面が狭いので舵のレスポンスはかなりイマイチ、効きもイマイチではっきり言って何もできない。ラムテェバックやタンブラなどをやってみようと思ったが幻想に終わった。またそんなに翼面荷重も高くないのにサイドスリップやコブラっぽい事をやろうとするとすぐに翼端失速を起こしコロンと回ってしまうのでかなりヒヤヒヤする。着陸では突っ込ましても機速がのらないので初心者にもお勧めしやすいヒコーキだがスタント機のように吊ってもって来ると前記のようにコロンといきやすいので注意が必要だ。 |
|
|
■ 履歴 ■ |
|